
Содержание
- 1 Как подключить шаговый двигатель к Arduino Uno?
- 2 Управление шаговым двигателем
- 3 Биполярные и униполярные шаговые двигатели
- 3.1 6-ти выводные шаговые двигатели
- 3.2 Униполярное подключение
- 3.3 Биполярное подключение
- 3.4 8-ми выводные шаговые двигатели
- 3.5 Биполярное последовательное подключение
- 3.6 Биполярное параллельное подключение
- 3.7 Пример: параметры ШД FL60STH86-2008AF для различных подключений
- 3.8 Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
- 4 Шаговый двигатель
- 5 Принцип работы шагового двигателя, схема подключения униполярного электродвигателя, пошаговое управление
Как подключить шаговый двигатель к Arduino Uno?
На производстве иногда применяют станки ЧПУ (Числовое Программное Управление). Агрегаты позволяют вырезать плоские детали, делать красивую резьбу по дереву и многое другое. На сегодняшний день в моде 3D-принтер, и он всё больше и больше набирает популярность.
Я недавно узнал, что ученые в США впервые в мире напечатали человеческий позвоночник из биоматериалов. Вот технологии быстро растут. И во всех этих аппаратов невозможно без шагового двигателя (ШД). Правда, связка — шаговый двигатель и Ардуино — это далеко не идеальный вариант (не для серьёзных объектов).
Но всё-таки призываю обратить внимание.
Из этой статьи вы узнаете:
Работа шагового двигателя и описание драйвера
Схема сборки на Fritzing
Описание библиотеки myStep и AccelStep
Описание кода программы
Доброго дня уважаемые друзья, коллеги, будущие партнёры и гости. Я снова на связи. С вами Гридин Семён. Сегодня мы рассмотрим интересную тему. Это соединение шагового двигателя с популярной электронной платой Arduino. Так что готовьте чай и читайте статью.
Как работает шаговик?
Для практических задач с точным перемещением объекта обязательно требуется ШД. Это мотор, который перемещает свой вал в зависимости от заданных шагов в программе контроллера. Чаще всего их применяют в станках ЧПУ, робототехнике, манипуляторах, 3D-принтерах.
Мы же с вами рассмотрим конкретный двигатель 28BYj-48 с драйвером управления ULN2003. Он достаточно дешёвый, прост в сборке и легко писать программу.
В 4-шаговом режиме он может совершать 2048 шагов, в 8-шаговом 4096 шагов. Питание 5 В, ток потребления 160 мА. Передаточное число 1:64 , то есть один шаг он совершит на 5,625 градусов. Крутящий момент составляет 34 мН.м. Средняя скорость 15 об/мин, с помощью программного кода можно ускорить до 35 об/мин, но вы должны понимать, что мы при этом теряем мощность и точность.
Размеры двигателя указаны из первоисточника — даташита производителя Kiatronics.
А вот таким образом он выглядит изнутри:
Для небольших технических проектов — 28BYj-48 идеальный вариант. Его главным преимуществом является дешевизна и простота. Прилагаю спецификацию:
| Тип мотора | Униполярный шаговый двигатель |
| Число фаз | 4 |
| Рабочее напряжение | 5-12 вольт |
| Частота | 100 Гц |
| Частота под нагрузкой | > 600 Гц |
| Крутящий момент | > 34.3 мН*м (120 Гц) |
| Режим шага | рекомендуется полушаговый режим (8-шаговая управляющая сигнальная последовательность) |
| Угол шага | 8-шаговая управляющая сигнальная последовательность — 5.625º/шаг4-шаговая управляющая сигнальная последовательность — 11.25º/шаг |
| Передаточное отношение редуктора | Производителем заявлено 64:1 |
| Вес | 30 г |
ШД имеет четыре обмотки, которые запитываются последовательно:
Для того, чтобы заставить мотор двигаться по часовой стрелке, нужно попеременно подавать на обмотки напряжение. Движок работает в двух режимах в шаговом и полушаговом, чем они отличаются, мы сейчас разберём.
1.Шаговый режим — это когда две из четырех обмоток запитываются на каждом шаге. Смотрите карту включения обмоток: Для этого способа используется библиотека myStepper.h.
| Провод | Фазы для шагового режима | ||
| 1 | 2 | 3 | 4 |
| 4 оранжевый | |||
| 3 желтый | |||
| 2 розовый | |||
| 1 синий |
2.Полушаговый режим — это когда запитывается первая обмотка, потом вторая и третья вместе, потом четвёртая и т.д. В Даташите разработчика указано, что предпочтительнее режим полушага для мотора. Подробно изображено на карте подключений:
| Провод | Фазы для полушагового режима | ||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 4 оранжевый | |||||||
| 3 желтый | |||||||
| 2 розовый | |||||||
| 1 синий |
Описание драйвера ULN2003
Плата представляет собой силовой модуль, который содержит в себе семь независимых транзисторов Дарлингтона. Каждая пара представляет собой каскад из двух биполярных транзисторов. ULN2003 является неким усилителем с током нагрузки 500 мА и напряжением 50 В. На изображении отображена сама плата и описание выводов к ней.
Управляющие входы IN1,IN2,IN3,IN4 подключаются к любым дискретным выводам Arduino Uno. Если кому интересно, можете прочитать статью здесь. Светодиоды отображают, какой шаг совершил двигатель. Выводы для подключения внешнего источника питания. Рекомендую запитывать отдельной батареей, так как нагрузка может возрастать до 1 А. Только не забудьте переставить джампер на внешнее питание двигателя.
Схема сборки на Fritzing
Для использования в учебных проектах я рекомендую Arduino Uno. Схему подключений я представляю в двух вариантах: принципиальной и визуальной схеме.
Описание библиотеки AccelStepper
Давайте мы перейдём к интересной части нашей статьи. Это описание двух библиотек для работы с двигателями myStepper и AccelStepper. Больше буду обращать внимание на библиотеку AccelStepper, так как у нее больше функции, а именно:
- есть возможность управлять скоростью,
- поддержка различных шаговиков
- поддержка одновременно работающих двигателей
Определение конфигурации моторов
AccelStepper mystepper (1, pinStep, pinDirection);
Для управления шаговым двигателем.
AccelStepper mystepper (2, pinA, pinB);
Биполярный ШД, управляемый Н-мостом.
AccelStepper mystepper (4, pinA1, pinA2, pinB1, pinB2);
Униполярный мотор, управляемый четырмя транзисторами.
mystepper.setMaxSpeed (stepsPerSecond);
Максимальная скорость двигателя. Скорость заведомо низкая. Сначала моторчик ускоряется до этой скорости, затем снижает её
mystepper.setAcceleration (stepsPerSecondSquared);
Ускорение шаговика, в шагах в секунду.
Управление положением
mystepper.moveTo (targetPosition);
Переместиться в абсолютно указанное положение. Само движение запускается функцией run ().
mystepper.move (distance);
Переместиться в относительно указанное положение. Само движение запускается функцией run (). Значение distance может быть больше или меньше нуля.
mystepper.currentPosition ();
Вернуть текущее абсолютное положение.
mystepper.distanceToGo ();
Вернуть расстояние до указанного положения. Может использоваться для проверки, достиг ли моторчик указанной конечной точки.
mystepper.run ();
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
mystepper.runToPosition ();
Начать движение и подождать когда двигатель достигнет указанной точки. Функция не осуществляет возврата пока он не остановится.
Управление скоростью
mystepper.setSpeed (stepsPerSecond);
Установить скорость в шагах за секунду. Сам процесс запускается функцией runSpeed ().
mystepper.runSpeed ();
Начать движение. Для продолжения движения двигателя следует вызывать функцию повторно.
Как видите функции управления в принципе не сложны, достаточно посидеть несколько вечеров.
Описание кода программы
Источник: http://kip-world.ru/kak-podklyuchit-shagovyj-dvigatel-k-arduino-uno.html
Управление шаговым двигателем
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора.
На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами.
Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Униполярные и биполярные шаговые двигатели
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
Подключение шаговых двигателей
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Схема подключения шаговых двигателей
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Источник: http://el-shema.ru/publ/ehlektrika/upravlenie_shagovym_dvigatelem/10-1-0-328
Биполярные и униполярные шаговые двигатели
- 6-ти выводные шаговые двигатели
- 8-ми выводные шаговые двигатели
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода.
Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов.
В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным.
Каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной системе управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов — униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения — использовать центральный отвод.
Электрические характеристики двигателя — ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. — в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения — биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
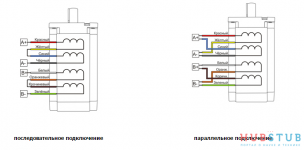
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов — униполярное, последовательное либо параллельное подключение обмоток двигателя.
Биполярное последовательное подключение
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток — 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении — Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
Источник: http://www.npoatom.ru/articles/4.html
Шаговый двигатель
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками.
Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг».
И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
- С переменным магнитным сопротивлением. Устройство таких моторов предполагает наличие нескольких полюсов на статичном элементе. Ротор в данном виде ШД обладает зубчатой формой и создается он из не жесткого материала, к тому же при этом сам не является намагниченным. Если мы в качестве примера рассмотрим мотор с переме
нным сопротивлением, в котором статор будет шести-полюсным, а конструкция ротора состоит из четырех зубцов, то количество независимых обмоток в таком двигателе составит 3 штуки. Каждая из них наматывается на два противоположных статорных полюса. Размер одного шага такого мотора составит 30 градусов. - ШД с постоянными магнитами. Как мы можем заключить из названия, в роторе такого двигателя обязательно применяются постоянные магниты. Полюсы располагаются параллельно моторной оси и обладают прямолинейной формой. Намагниченность ротора позволяет обеспечить более мощный магнитный поток. По этой причине, крутящий момент будет на порядок выше, чем в ШД с переменным сопротивлением. Обычно величина шага двигателя с постоянными магнитами варьируется в диапазоне 7,5-15 градусов. А количество шагов на один оборот, в зависимости от модели, может составлять 24-48.
- Шаговые двигатели гибридного типа. При изобретении таких моторов делался упор на то, чтобы максимально эффективно сочетать в одном устройстве достоинства двух описанных выше видов ШД. Зубцы в роторе гибридного двигателя установлены в осевом направлении. Это позволяет обеспечить более высокую скорость, сократить величину шага и увеличить крутящий момент. В большинстве гибридных ШД число шагов за один оборот составляет от 100 до 400. При этом, угол одного шага – всего 0,9-3,6 градусов. Для снижения скачкообразности движения ротора используется особый режим микрошагов. Самый распространенный представитель данного вида — это биполярный шаговый двигатель nema.
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами. Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами.
Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать.
Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные. Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные. Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения. Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент. Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент. Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение. Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора. Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса. Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
Рассмотрим на примере шаговый двигатель nema. Двигатель PL57H41, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — H41. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57H110
| PL57H110 | L, мм | 131 | Индуктивность фазы, мГн | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Радиальное биение вала двигателя (нагрузка 450г.) | Размер шпоночного паза, мм |
Характеристики PL86H113
| PL86H113 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода.
Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов.
Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег.
Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
Источник: http://zewerok.ru/shagovyj-dvigatel/
Принцип работы шагового двигателя, схема подключения униполярного электродвигателя, пошаговое управление
Шаговым двигателем называют электромеханическое устройство, преобразующее электрические сигналы в дискретные угловые перемещения вала. Применение шаговых двигателей позволяет рабочим органам машин совершать строго дозированные перемещения с фиксацией своего положения в конце движения.
Применяются в станках с ЧПУ, робототехнике, где требуется дискретные движения, фиксация положения и небольшая скорость.
Отличие и разновидности шаговых двигателей
По принципу работы они ближе к двигателям постоянного тока. Конструкция электродвигателей постоянно совершенствуется для уменьшения трудозатрат при изготовлении, повышения КПД и увеличения количество оборотов. У них по сравнению с двигателем постоянного тока нет щёток, коллектора, а обмотки с меньшим количеством витков.
Среди первых двигателей был создан миниатюрный двигатель для ручных часов и назван в честь французского инженера Мариус Лавета. Статор расцеплен на краях или в районе ротора имеет небольшие сужения. Ротор диаметром 1.5 мм, магнитный на основе кобальта. Одна обмотка в один ряд питание 1.5 вольта. Угол поворота 90 градусов.
Моторчик лавета применяется также и в медицине для перекачки различной жидкости, а также часто используется в миксерах и блендерах.
В последнее время ведутся разработки пьезоэлектрических двигателей с использованием пьезомагнитного эффекта и применяя в конструкции ферромагнитные материалы. Совершенствуются линейные электродвигатели, у которых вал не вращается, а совершает линейные движения. Для оборудования точной механики российские производители выпускают двигатели с маркировкой серии:
- ДШ.
- ДШР.
- ДШГ.
- ДШЛ.
- ШД.
- ДШЭ
В производстве их участвуют такие предприятия, как НПО «АТОМ», ZETEK, компания Электропривод, Stepmotor, Вексон, НПО РИФ, Саратовский эл. механический, корпорация ВНИИЭМ, ЗАО Уралэлектромаш, АРК «Энергосервис». Производством ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD занимаются зарубежные фирмы: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и другие. Ассортимент выпускаемых ШД разнообразный: по типоразмерам, мощности, со встроенным редуктором и платой управления.
Конструкция и принцип работы
Шаговый двигатель состоит из статора и вращающегося ротора. Сердечник статора выполнен в виде набора листов электротехнической стали (штампованных). Это уменьшает вихревые токи и соответственно нагрев. Статор по окружности разбит на 4.6.8 продольных пазов. Применяется и больше. На выступах между пазами располагаются обмотки в виде катушек. Количество пазов соответствует количеству полюсов двигателя. Чем больше полюсов, тем меньше угол поворота ротора, то есть шаг.
Ротор состоит из одного или двух постоянных магнитов, с торцов, металлические пластины которого закреплены с зубьями. При этом плюса S и N постоянного магнита разбиваются на n полюсов, что соответствует количеству зубьев. Это также влияет на величину шага вращения. По конструкции ШД выпускаются трёх типов в зависимости от конструкции ротора:
- реактивный;
- ротор из постоянного магнита;
- гибридный.
Реактивный — ротор выполнен из ферромагнитного материала с продольными пазами, полюсами. Он используется редко, только для выполнения простых задач. В основном из-за того, что у него нет стопорящего момента. Гибридный — ротор изготовлен из двух половинок ферромагнитного материала, с продольными пазами и между ними расположен постоянный магнит. Пазы половинок относительно друг друга, сдвинуты на небольшой угол, для понижения шага. Они чаще всего применяются.
При подаче импульсного напряжения на обмотку статора образуется электромагнитное поле. Взаимодействуя, с ближайшим полюсом постоянного магнита создаётся крутящий момент. Вал двигателя поворачивается на определённый угол. Угол поворота в основном зависит от количества полюсов ротора.
Такой двигатель и будет называться шаговым. Благодаря небольшим размерам ШД серии Em 422 применяется в матричных принтерах.
Методы управления фазами
Управление в основном зависит от количества полюсов и конфигурации обмоток статора. ШД выпускаются в основном со следующими обмотками:
- Две обмотки с 4 выводами.
- Две обмотки с 6 проводами со средним выводом.
- Четыре обмотки — 8 выводов.
Управлять можно двумя методами, использовать однополярное напряжение — униполярное или двухполярное — биполярное. Униполярный шаговый двигатель имеет 4 полюса и 2 обмотки.
У четырехфазного каждая обмотка разделена пополам и располагается на противоположных полюсах. Вращение осуществляется поочерёдной подачей напряжения на обмотки. При 6 выводах или 5 тоже 2 обмотки, но с отводом от середины.
Обычно средние выводы катушки соединяются вместе на минусовой провод, а плюсовой через управляемые ключи подаётся на обмотки.
Двигатели с биполярным управлением имеют 4 обмотки, по 2 на каждую фазу. Управление происходит при смене полярности обмотки. При таком управлении усложняется схема подключения шагового двигателя, но крутящий момент при этом получается больше. Основные характеристики — напряжение питания, потребляемый ток фазы, шаг, мощность и размер фланца. Посадочные места стандартизированы и указываются как, например, Nema 23. Это соответствует расстоянию между отверстиями под крепление 57 мм.
Способы управления шаговым двигателем
Применение ШД в станках с ЧПУ конкурирует только с сервоприводами, например, в эрозионных станках или принтерах, они даже превосходят их по своим техническим возможностям, себестоимости и простым схемам управления. Управление можно осуществлять на цифровых микросхемах, специализированных — А3977, на программированной PIC16, через ключи или драйверы SMSD 1.5.
Большинство драйверов управляются компьютером через порты RS-232, USB и LPT. Они вырабатывают сигналы управления: шаг, направление, разрешение и обеспечивают дробление шага на ½ до 1/32 и работают с программами: MACH3, KCam, DeskCNC, Turbocnc и другими. Кабелем подключить двигатель к драйверу согласно описанию. Изучив работу программы, запустить в работу несложно. Для включения используется напряжение от 5 вольт до 48 вольт. Исключения составляют двигатели на 220/110 вольт.
Микрошаговый режим привода
Основное время работы ШД происходит в пошаговом или полушаговом режиме, а при пуске и остановке желательно использовать микрошаговый режим для точной фиксации. Пошаговый режим определён конструкцией и импульсным управлением. При микрошаговой работе на обмотки подаются синусоидальные напряжения с нужным сдвигом фаз.
Ротор фиксируется при определённом соотношении фаз токов в обмотках. Расчёт точки равновесия произвести по формуле x = S *pi/2*arctg a/b где:
- a — момент, создаваемый первой фазой и b — второй фазой;
- x — точка равновесия ротора или микрошаг в радианах;
- S — угол шага.
А также надо учитывать максимальную частоту управляющего сигнала, при которой нет потери или добавления лишнего шага в процессе работы. Она является основным показателем переходного режима шагового двигателя и обозначается в характеристиках, как частота приёмистости двигателя.
В процессе эксплуатации необходимо следить за чистотой вокруг привода и не допускать попадания металлической стружки, возможен выход из строя ШД. Найти способ защитить привод. Ремонт аналогичен ремонту коллекторного двигателя, требует аккуратности.
После разборки взять и продуть сжатым воздухом статор и ветошью протереть ротор. Проверить отсутствие биения подшипников.
Источник: https://elektro.guru/polezno-znat/printsip-rabotyi-i-upravleniya-unipolyarnogo-shagovogo-dvigatelya.html