Содержание

Содержание
Шаговые двигатели присутствуют в автомобилях, принтерах, компьютерах, стиральных машинах, электробритвах и многих других устройствах из повседневного быта. Однако многие радиолюбители до сих пор не знают, как заставить такой мотор работать и что он вообще из себя представляет. Итак, давайте узнаем, как использовать шаговый двигатель.
Шаговые двигатели являются частью класса моторов, известных как безщеточные двигатели. Обмотки шагового двигателя являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Также существует ещё два типа шаговых двигателей: униполярные и биполярные. На фундаментальном уровне, эти два типа работать точно так же; электромагниты включены в последовательном виде, заставляя центральный вал двигателя вращаться.
Но униполярный шаговый двигатель работает только с положительным напряжением, а биполярный шаговый двигатель имеет два полюса — положительный и отрицательный.
[su_box style="default" title="" box_color="#F27405" radius="0"]То есть фактическая разница между этими двумя типами заключается в том, что для однополярных требуется дополнительный провод в середине каждой катушки, что позволит току проходить либо к одному концу катушки, либо другому. Эти два противоположных направления производят две полярности магнитного поля, фактически имитируя как положительные, так и отрицательные напряжения.
[/su_box]Хотя оба они имеют общий уровень питающих напряжений 5V, биполярный шаговый двигатель будет иметь больший крутящий момент, потому что ток течет через всю катушку, производя более сильное магнитное поле. С другой стороны, униполярные шаговые двигатели используют только половину длины катушки из-за дополнительного провода в середине катушки, а значит меньший крутящий момент доступен для удержания вала на месте.
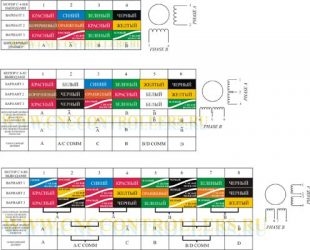
Разные шаговые двигатели могут иметь разное количество проводов, как правило, 4, 5, 6, или 8. 4-х проводные линии могут поддержать только биполярные шаговые двигатели, поскольку у них нет центрального провода.
5-ти и 6-ти проводные механизмы могут быть использованы как для однополярного, так и биполярного шагового двигателя, в зависимости от того, используется центральный провод на каждой из катушек или нет. 5-ти проводная конфигурация подразумевает, что центральные провода на два комплекта катушек соединены внутри между собой.
Есть несколько различных способов управления шаговыми двигателями — полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг — такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг — поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Схемы управления достаточно сложны, по сравнению с обычными электромоторчиками, и имеют много особенностей. Подробно рассматривать тут мы их не будем, а просто приведём фрагмент популярного контроллера на ULN2003A.
В общем шаговые двигатели являются отличным способом для того, чтобы повернуть что-то в точный размер угла с большим количеством крутящего момента. Другое преимущество их в том, что скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Источник: https://el-shema.ru/publ/ehlektrika/upravlenie_shagovym_dvigatelem/10-1-0-328
instrument.guru > Своими руками > Шаговый двигатель своими руками, принцип работы, схема подключения
Для работы любого электрического прибора, необходим специальный приводной механизм. Шаговый двигатель, является одним из таких устройств. Сегодня есть большой выбор разнообразных электродвигателей, разделяющихся по типу и по схеме драйвера, которым управляет контроллер.
Шаговый двигатель — это синхронное электромеханическое устройство, которое передает сигнал управления в механическое движения ротора. Вращение происходит шагами, которые фиксируются в определенном положении.
При прикладывании напряжения к клеммам, щетки электродвигателя запускаются и начинают беспрерывно вращаться. Движок холостого хода обладает особым свойством, это превращение входящих импульсов прямоугольной направленности в заранее установленное положение приложенного ведущего вала.
https://www.youtube.com/watch?v=Jw3DHiO2VPwВал сдвигается под фиксированным углом с каждым импульсом. Если вокруг центрального куска железа зубчатой формы расположены несколько зубчатых электромагнитов, то устройства с таким редуктором достаточно эффективны.
Микроконтроллер возбуждает электромагниты. Один зубчатый электромагнит под воздействием энергии притягивает зубья зубчатого колеса к своей поверхности, таким образом, вал двигателя делает поворот.
Когда зубья выровнены по отношению к электромагниту, они немного смещаются к соседней магнитной детали.
Чтобы шестеренка начала вращение и выровнялась с предыдущим колесом, первый электромагнит отключается, а следующий включается. Затем весь процесс повторяется столько раз, сколько необходимо. Такое вращение называют постоянным шагом. Подсчитав количество шагов при полном обороте двигателя, определяется скорость его вращения.
Шаговые двигатели по конструкции ротора делятся на три типа: реактивный, с постоянными магнитами и гибридный.
Униполярный. Изменять расположение магнитных полюсов можно, не меняя при этом направленность тока. Достаточно включить отдельно каждую фазу обмотки. Устройство состоит из одной обмотки на фазу с расположенным в центре ответвлением.
Биполярный . У таких двигателей на фазу приходится одна обмотка, нет общего вывода, а есть два — на фазу. Благодаря этому биполярные устройства обладают наибольшей мощностью, чем униполярные. Для изменения магнитных полярностей полюсов, в обмотке изменяют направления тока.
Чтобы уменьшить угол шага, был разработан гибридный шаговый двигатель. В свою конструкцию, он включает лучшие свойства двигателя с постоянными магнитами и реактивного двигателя. Ротор представлен в виде намагниченного вдоль продольной оси цилиндрического магнита. Статор состоит из двух или четырех фаз, которые размещены между парами явно выраженных полюсов.
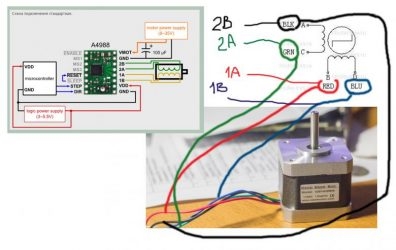
Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе. Шаговые электродвигатели могут иметь от 4 до 8 проводов, поэтому для их подключения используют определенную схему.
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
Устройство может работать в трех режимах:
В области электротехники и механики шаговый электродвигатель считается сложным устройством, которое включает в себя множество механических и электрических возможностей. На практике применяются следующие технические характеристики:
Источник: https://instrument.guru/svoimi-rukami/shagovyj-dvigatel-printsip-raboty-shema-podklyucheniya.html
Предшественником шагового двигателя является серводвигатель.
https://www.youtube.com/watch?v=lltPYkIJDsIШаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи.
Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
[su_box style="default" title="" box_color="#BF0404" radius="0"]Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
[/su_box]Источник: https://stanki-info.com/shagovyy-dvigatel-4-provoda-podklyuchenie/