Содержание

Содержание
Слишком высокая или как еще её называют, реактивная энергия и мощность, способствуют значительному ухудшению работы электрических сетей и систем. Мы предлагаем рассмотреть в нашей статье как производится автоматическая компенсация реактивной мощности (крм) и перекомпенсация в сетях на предприятиях, в квартире и в быту.
Чем больше требуется энергии — тем выше становится уровень потребления топлива. И это не всегда оправдано. Компенсация мощности, т.е, её правильный расчет, поможет сэкономить в промышленных распределительных электросетях на производстве до 50 % затрачиваемого топлива, а в некоторых случаях и больше.
Нужно понимать, что тем больше ресурсов затрачено на производство, тем выше будет цена конечного продукта. При возможности снизить стоимость изготовления товара, производитель либо предприниматель, сможет снизить его цену, чем привлечь потенциальных клиентов и потребителей.
Как наглядный пример – пара диаграмм ниже. Эти векторы визуально передают полный эффект от работы установки.
Диаграмма до работы установкиДиаграмма после работы установки
Кроме этого, мы также избавляемся от потерь в электросетях, от чего эффект следующий:
Чаще всего реактивная энергия и мощность потребляется при использовании трехфазного асинхронного двигателя, здесь и нужна компенсация сильнее всего. Согласно последним данным: 40 % — потребляют двигатели (от 10 кв), 30 – трансформаторы, 10 – преобразователи и выпрямители, 8% — расход освещения
Для того чтобы этот показатель уменьшить, используются конденсаторные устройства или установки. Но существует огромное количество подтипов этих электроприборов. Какие бывают конденсаторные установки и как они работают?
: Что такое компенсация реактивной мощности и для чего она нужна?
Для того чтобы производилась компенсация энергии и реактивной мощности конденсаторными батареями и синхронными двигателями, понадобится установка энергосбережения. Чаще всего используют подобные устройства с реле, хотя вместо него может быть установлен контактор либо тиристор. Дома используются релейные приборы дуговой компенсации. Но если проводится компенсация реактивной энергии и мощности на заводах, у трансформаторов (там, где несимметричная нагрузка), то намного целесообразнее применять тиристорные устройства.
[su_box style="default" title="" box_color="#F27405" radius="0"]В отдельных случаях возможно использование комбинированных устройств, это приборы, которые одновременно работают и через линейный преобразователь, и через реле.
[/su_box]Чем поможет использование установок:
Предварительно понадобится схема работы электросети, и документы от ПУЭ, по которым и проводится решение о компенсации энергии и реактивной мощности ДСП. Далее необходим экономический расчет:
Далее нужно сгенерировать часть мощности сразу на месте её поступления в сеть при помощи генератора. Это называется централизованная компенсация. Она может проводится также при помощи установки cos, electric, schneider, tg.
Но существует также индивидуальная однофазная компенсация реактивной энергии и мощности (либо поперечная), её цена намного ниже. В этом случае производится установка упорядоченных регулирующих устройств (конденсаторов), непосредственно у каждого потребителя питания. Это оптимальный выход, если регулируется трехфазный двигатель или электропривод. Но у этого типа компенсации есть существенный недостаток – она не регулируется, и поэтому называется еще и нерегулируемой или нелинейной.
https://www.youtube.com/watch?v=m8N3A-O9zoAСтатические компенсаторы или тиристоры работают при помощи взаимоиндукции. В этом случае переключение производят при помощи двух или более тиристоров. Самый простой и безопасный метод, но его существенным недостатком является то, что гармоники генерируются вручную, что значительно усложняет процесс монтажа.
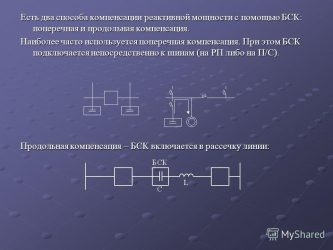
Продольная компенсация производится методом варистора или разрядника.
Продольная компенсация реактивной мощности
Сам процесс происходит из-за наличия резонанса, который образуется из-за направления индуктивных зарядов друг другу на встречу. Данная технология и теория компенсации мощности применяется для реактивных и тяговых двигателей, сталеплавильной или станочной техники Гармоники, к примеру, и именуется еще искусственная.
Существует огромное количество производителей и типов установок конденсаторных установок:
Их стоимость разнится в зависимости от организации, для боле точной и исчерпывающей информации посетите форум, где обсуждается компенсаций реактивной мощности.
Источник: https://www.asutpp.ru/kompensaciya-reaktivnoj-moshhnosti.html
.com/club152685050 | .com/id446425943
26
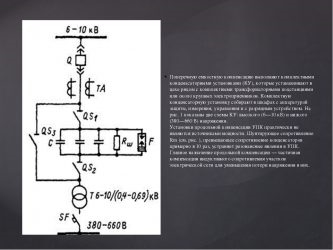
При включении конденсаторов в электрическую сеть напряжением выше 1000 в
С 5,5I SIN 103
,
U C k т2
где kт – коэффициент трансформации трансформатора;
I — ток в сети напряжением до 500 в при пуске электродвигателя.
Пределы регулирования ограничиваются индуктивным сопротивлением сети и электродвигателя, т.е. индуктивным сопротивлением всей схемы замещения.
Сравнение продольной и поперечной компенсации по повышению уровня напряжения U2,
величине активных потерь электроэнергии и требуемой мощности конденсаторов для заданных значений P2 и Q2 при неизменном напряжении в начале линии электропередачи представляет
определенный интерес.
Повышение напряжения в электрической сети может быть достигнуто с помощью продольной и поперечной компенсации.
Разность в величинах относительных потерь напряжения до и после включения продольной компенсации
U p *U *U ' cQx2 .
U
Из соотношения QC=I2cx можно определить с и подставить его в выражение для разности в
относительных потерях напряжения в линии:
| U ' | QC | Q2 x | QC | Q | . |
| p | |||||
| * | I 2 x | U 22 | S | 22 | 2 |
При поперечной компенсации относительная потеря напряжения уменьшится до
*U ' ' P2 r Q22 QC x , U 2
где QC – мощность конденсаторной установки при поперечной компенсации.
Разность в относительных потерях составит:
| xQ | xQ | I 2 | Q | |
| U ' ' | C | C | C | Q. |
| p | ||||
| U 22 | U 22 | I 2 | S 22 |
Сравнение этих формул показывает, что при продольной компенсации компенсирующих эффект по напряжению пропорционален полной реактивной нагрузке Q2, в то время как при
поперечной компенсации этот эффект пропорционален лишь реактивным потерям.
При поперечной компенсации потери электроэнергии снижаются не столько за счет повышения уровня напряжения, как при продольной компенсации, а в основном за счет уменьшения величины передаваемой реактивной мощности.
https://www.youtube.com/watch?v=pVNd9hF4CmsИзменение потерь в зависимости от степени компенсации для поперечной компенсации выражается равенством
| dWпот | 2 Q2 QC r 'C | 2 Qr ' 'C | , | ||||
| dQ | U 2 | U U | 2 | 2 P r Q | 2 | Q | x |
| C | 2 | 1 | 2 | C |
а для продольной компенсации равенством
.com/club152685050 | .com/id446425943
27
| dWпот | 2Q2 r п.к | , | ||
| dQ | п.к | U 2 | 2 P r Q | x |
| 1 | 2 | 2 |
где С, ’’С, п.к – время годовых потерь.
Снижение активных потерь в линии электропередачи при продольной компенсации пропорционально величине Q2, а при поперечной – разности (Q2 – QС).
Из этих равенств следует, что продольная компенсация в отношении снижения активных
потерь экономичнее поперечной только при QС > 2 Q или с > 2 и при Q, значительно меньшем, чем Q2, и необходимости выполнения высокой степени компенсации.
При малой степени компенсации (QС мало) эффективность поперечной компенсации
значительно больше продольной.
Капитальные затраты при последовательном включении конденсаторов значительно меньше, чем при параллельном, эксплуатационные же расходы несколько больше.
Для получения одинакового эффекта регулирования напряжения соотношение между необходимой реактивной мощностью при продольной компенсации Qп.к и при поперечной компенсации QС определяется из следующих условий.
Напряжения в начале и конце линии электропередачи с одной нагрузкой равны:
| U 2 | P2 r Q2 x | j | P2 x Q2 r |
| U1 | , | ||
| U 2 | |||
| U 2 |
где U1 – напряжение в начале линии, кв; U2 – то же в конце линии, кв;
Р2 – активная мощность нагрузки, Мвт; Q2 – реактивная мощность нагрузки, Мвар;
r – активное сопротивление всей последовательной цепи, ом; х – реактивное сопротивление той же цепи, ом.
Пренебрегая влиянием поперечной составляющей падения напряжения, что допустимо при расчете сетей напряжением до 35 кв, получаем:
U1 U 2 P2 r Q2 x . U 2
Пусть напряжение U2 необходимо повысить до величины U’2.
При параллельном включении конденсаторов
U1 U ' 2 P2 r Q2 QC x . U ' 2
При последовательном включении конденсаторов
U1 U ' 2 P2 r Q2 x xC . U ' 2
Из сравнения уравнений получаем:
| xC | QC x | ||
| . | |||
| Q2 | |||
| Умножив обе части уравнения на 3I2, получаем: | |||
| 3I 2 x | Q | 3I 2 x | . |
| C | C | ||
| Q2 | |||
| Левая часть этого уравнения – мощность последовательных конденсаторов Qп.к; числитель | |||
| дроби в правой | части представляет собой потери реактивной мощности Q в линии | ||
| электропередачи. |
.com/club152685050 | .com/id446425943
28
Таким образом,
Q Qп.к QC Q2 ,
или
Qп.к Q
QС Q2
Отсюда видно, что при регулировании напряжения в электрических сетях 6 – 35 кв при
последовательном включении конденсаторов требуется меньшая мощность их по сравнению с параллельным включением.
| Отношение Q/Q2 | зависит от COS и r0/x0 проводов. Из полученного уравнения нетрудно | ||
| получить | U % | ||
| Qп.к | . | ||
| Q | 2 | r | |
| С | 100 SIN | 1 | ctg |
| x |
Зависимость Qп.к/QС от r0/x0 для значений COS =0,6-0,9 приведена на рис. 76.
Применение последовательно включенных конденсаторов наиболее благоприятно по сравнению с параллельным включением при низких коэффициентах мощности нагрузки и большом активном сопротивлении электрической цепи.
https://www.youtube.com/watch?v=HoLCPXuwdCcДля сетей 6 и 10 кв с проводами марок М-10 – М-95 и А-16 – А-95 при U=10% максимальное значение Qп.к/QС имеет место для проводов марки М-95 и COS =0,9 и составляет
0,222, а минимальное значение – для проводов марки А-16 и COS =0,6 и составляет 0,0337.
Для сетей 35 кв отношение r/x резко снижается и относительная мощность
последовательных конденсаторов несколько повышается.
.com/club152685050 | .com/id446425943
1.Режимы работы ЭЭС
2.Устойчивость ЭЭС
3.Противоаварийная автоматика ЭЭС
4.Качество ЭЭ
5.Электрические нагрузки
6.Перенапряжения в ЭЭС
7.Компенсация реактивной мощности
8.Балансы мощности и электроэнергии
9.Расчет токов КЗ
10.Основы РЗиА
11.Выбор сечений проводов и кабелей
12.Выбор электрических аппаратов
13.Выбор трансформаторов
14.Выбор АВ и предохранителей
Источник: https://studfile.net/preview/8818513/page:41/
 Назад в библиотеку
Назад в библиотеку Источник:Источник оригинальной статьи
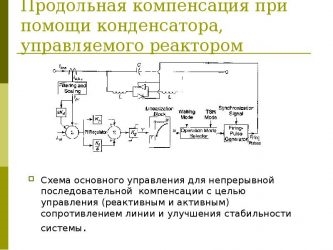
Компенсация реактивной мощности – это управление реактивной мощностью для повышения производительности сети переменного тока. В общем, проблема компенсации реактивной мощности связана с поддержкой нагрузки и напряжения.
В дополнении целей, повышение значения коэффициента мощности системы для сбалансирования реальной мощности от сети переменного тока, усиление регулирования напряжения, а также устранение гармонических составляющих крупных колебаний нелинейных промышленных нагрузок. Поддержание напряжения, как правило, требуется для уменьшения колебания напряжения в линии электропередачи передачи.
Компенсация реактивной мощности повышает стабильность системы переменного тока за счет увеличения максимальной активной мощности, которая может быть передана.
Продольная и поперечная компенсации реактивной мощности используются для изменения естественных электрических характеристик систем переменного тока. Последовательная компенсация изменяет параметры передачи или системы распределения, в то время как поперечная компенсация изменяет эквивалентное сопротивление нагрузки. В обоих случаях, реактивной мощностью, которая течет через систему, можно эффективно управлять, повышая производительность системы в целом.
Принципы и теоретические основы поперечной компенсации реактивной мощности будут объяснены ниже. Базовая система переменного тока состоит из источника питания VS, сопротивления линии с сопротивлением R + jX, и типично индуктивной нагрузкой VL (рис. 1). В системе без компенсации, ток источника IS и ток нагрузки IL одинаковы, потому что нагрузка, как правило, индуктивная, и ток отстает от напряжения нагрузки VL. Сдвиг характеризуется углом φ.
В результате, источник питания должен генерировать полный ток нагрузки, поддержание высокого уровня тока источника от генератора и через линии электропередачи означает увеличение потерь мощности и снижение возможности передачи электроэнергии. Ток нагрузки IL можно разделить на две составляющие: IP, которая находится в фазе с VL и создает реальную мощность (активная мощность), и IQ, который отстает от напряжения VL на 90° и создает реактивную мощность.
Тогда источник VS может генерировать только реальный составляющую IP , а IQ может быть создан около нагрузки устройством компенсации реактивной мощности.
Рисунок 1 – Принципы поперечной компенсации: (а) – системы без компенсации реактивной мощности, (б) – системы, которая использует поперечную компенсацию реактивной мощности. Схема, векторная диаграмма тока и напряжения приведены в каждой части рисунка
Если реактивная мощность (мнимая мощность) генерируется около нагрузки, то ток от источника уменьшается или сводится к минимуму, что снижает потери мощности и улучшает регулирование напряжения на нагрузке. Поперечную компенсацию можно осуществить тремя способами: с помощью конденсатора, источника тока или источника напряжения. В результате, система регулирования напряжения улучшается, и величина тока, требуемая от источника, уменьшается.
Компенсация реактивной мощности может быть также другого типа. Типичные системы поперечной компенсации используют конденсаторы для уменьшения эквивалентной реактивности составляющей питающей сети при номинальной частоте (рис. 2).
Таким образом, последовательно включенный конденсатор C генерирует реактивную мощность, которая уравновешивает часть реактивного сопротивления линии. Это происходит вследствие резонанса напряжений в конденсаторе и индуктивности, направленных встречно (под углом 180°).
Разрядник и варистор используются, чтобы избежать разрушения конденсатора С от перенапряжений.
Рисунок 2 – Продольная компенсация с защитой
Традиционно для компенсации реактивной мощности используются фиксированные или механически переключаемые конденсаторы или катушки индуктивности, или синхронные компенсаторы. Тем не менее, в последние несколько десятилетий появились два новых семейства генераторов реактивной мощности с использованием силовой электроники: статические тиристорные компенсаторы и самостоятельно коммутируемые статические преобразователи.
Как и в случае синхронных компенсаторов, в целях обеспечения точного контроля над всей реактивной мощностью, регулирование компенсатора было выполнено на тиристорах, преимущество которых заключается в быстром времени отклика и снижении затрат.
Компенсаторы состоят из стандартных генераторов реактивной мощности (реакторов и конденсаторов), которые управляются с помощью тиристоров для обеспечения быстрого переключения реактивной мощности.
Эти компенсаторы могут быть сгруппированы в две основные категории: тиристорно-коммутируемые конденсаторы (ТКК) и тиристорно-управляемые реакторы (ТУР).
В ТКК ступенчато-регулируемые конденсаторы индивидуально переключаются помощью двунаправленных тиристорных переключателей. Каждое однофазное отделение состоит из двух основных частей, конденсаторов и пары тиристорных коммутаторов.
Конденсатор может быть включен с минимальной выдержкой, если тиристор включен в тот момент, когда напряжение на конденсаторе и напряжение сети имеют одинаковые значения.
Несмотря на привлекательную теоретическую простоту тиристорно-переключаемых конденсаторов, их популярности препятствует ряд практических недостатков: компенсация реактивной мощности не является непрерывной, и каждый из конденсаторов требует отдельного переключателя-тиристора. Поэтому строительство экономически нецелесообразно.
https://www.youtube.com/watch?v=Qx1Y-y6FRs0ТУР использует двунаправленный переключатель, реализованый с помощью пары противоположно связанных тиристоров, в серии с L индуктивностью и шунтирующим конденсатором C (рис. 3). Поскольку используется фазовый угол для управления, получается непрерывный спектр потребления реактивной мощности.
При увеличении угла тиристорного пропускания от 90° до 180° — ток реактора уменьшается. Это эквивалентно увеличению индуктивности, т.е. снижению реактивной мощности, потребляемой реактором.
Основным недостатком этой конфигурации является генерация гармоник, которые заставляют реализовывать более сложной топологии (с пассивными фильтрами, с помощью дельта-соединения или двенадцати-импульсный конфигурации).
Рисунок 3 – Тиристорно-управляемые реакторы (ТУР)
[su_box style="default" title="" box_color="#BF0404" radius="0"]Тиристоры используются также для продольной компенсации. Тиристорно-управляемый продольный компенсатор (ТУПР) представляет собой технологию, которая устраняет определенные проблемы в динамических системах передачи электроэнергии (рис. 4). ТУПР являются отличным инструментом демпфирования при соединении больших электрических систем. Кроме того, они уменьшают проблемы подсинхронного резонанса – явление, которое включает в себя взаимодействие между крупными энергоблоками ТЭС и компенсацией систем передачи.
[/su_box]Рисунок 4 – Тиристорно-управляемый продольный компенсатор (ТУПР)
С развитием силовых полупроводниковых приборов (биполярные транзисторы с изолированным затвором IGBT) внимание было сосредоточено на коммутации компенсаторов реактивной мощности. Возможно несколько подходов, включающие источник тока и напряжения. Инвертор источника тока использует реактор с регулируемым постоянным током, а источник напряжения использует конденсатор с регулируемым напряжением постоянного тока. В самостоятельно коммутируемых компенсаторах реактивной мощности также применяется преобразователь напряжения (рис. 5).
Рисунок 5 – Cамокоммутирующийся преобразователь напряжения на IGBT транзисторе
Основными преимуществами собственной коммутацией компенсаторов реактивной мощности является значительное сокращение размера, стоимости и гармонических искажений. Самокоммутируемые компенсаторы для стабилизации систем передачи электроэнергии улучшают регулирование напряжения, обеспечивают правильный коэффициент мощности, а также правильный дисбаланс нагрузки.
Кроме того, они могут быть использованы для реализации продольной и последовательной компенсации. Рисунок 6 показывает возможности поперечных компенсаторов реактивной мощности, реализованных с помощью самостоятельной коммутации на преобразователе напряжения. Управление реактивной мощностью осуществляется путем изменения амплитуды выходного напряжения Vmod, которое изменяется с помощью широтно-импульсной модуляции (ШИМ) (рис. 6 (а)).
При Vmod больше напряжения на компенсаторе Vcomp, компенсатор генерирует реактивную мощность (рис. 6 (б)), а при Vmod меньше, чем Vcomp, компенсатор реактивной мощности потребляет энергию (рис. 6 (с)). Его принцип работы схож с синхронной машиной. Ток компенсатора может быть опережающим или отстающим, в зависимости от относительной амплитуды Vcomp и Vmod.
[su_quote]Напряжение на конденсаторе VD, подключенного к цепи постоянного тока преобразователя, остается постоянным и равным эталонной величине V, реализуемое контуром управления обратной связью.
[/su_quote]Рисунок 6 – Ток и напряжение источника, самокоммутируемого поперечного компенсатора реактивной мощности; (а) – топология компенсатора; (б) – ток и напряжение для опережеющей компенсации (Vmod > Vcomp); (с) – ток и напряжение для отстающей компенсации (Vmod < Vcomp).
Источник: http://masters.donntu.org/2012/etf/shevchenko_i/library/article10.htm